Hochpräzises CW-Radarsystem mit geringer Leistungsaufnahme für industrielle und medizinische Anwendungsbereiche
Aufgrund der sinkenden Kosten und Größe von Hochfrequenz (HF)-Komponenten, sind Radarsysteme in vielen Bereichen für verschiedene Anwendungen sehr attraktiv geworden. Darüber hinaus ist die Kombination von hoher Auflösung, geringem Stromverbrauch und der Betrieb in rauen Umgebungen einzigartig und übertrifft häufig herkömmliche Sensoren. In diesem Artikel wird ein Radarsystem vorgestellt, das mit einem low-power Transceiver entwickelt wurde. Dieses System soll die Verwendbarkeit für industrielle sowie medizinische Anwendungen mit einem CW-Radarsystem im 24 GHz Industrial, Wissenschaft und Medizin (ISM) Band zeigen. Der Bericht basiert auf dem IEEE Microwave Magazine Artikel [1].
Wenn Sie mehr über die von Sykno entwickelte Radartechnologie zur hochgenauen Bestimmung von Vitalzeichen und Herztönen wissen wollen, schauen Sie sich gerne diesen neuen Blogeintrag oder das YouTube-Video an.
Radarbasierte Sensorik
Heute bilden zwei Hauptanwendungsbereiche die treibenden Kräfte der Sensorentwicklung:
Zum einen besteht im Moment eine zunehmende Forschung an industriellen Sensorsystemen. Diese Entwicklung wird außerdem durch die Digitalisierung der Produktion in verschiedenen industriellen Umgebungen und intelligenten Fabriken vorangetrieben, die allgemein als Industrie 4.0 bekannt ist. Dies bezeichnet die vierte Revolution der Industrie nach der Dampfmaschine, der Massenproduktion und der automatisierten Produktion. Es wird daher immer wichtiger, möglichst viele Messwerte zu erhalten, um die Datengenerierung und damit die Informationen, die durch maschinelle Lernalgorithmen gewonnen werden können, zu erhöhen. In diesem Umfeld bietet die Radartechnologie viele Vorteile gegenüber herkömmlichen Sensoren, die für Überwachungszwecke eingesetzt werden. Radarsysteme können leicht von Radomen verdeckt werden, durchdringen Nebel und Staub und sind daher selbst in den rauesten Umgebungen einsetzbar, um verschiedene Maschinentypen hinsichtlich ihrer Vibrationen oder Distanzänderungen zu überwachen.
Auf der anderen Seite besteht der medizinischen oder Lifestyle-Sektor, in dem die Radar- und Hochfrequenztechnologie sich von anderen Sensortechnologien abheben. Ohne großen Aufwand in der Signalverarbeitung kann das Radarsystem zur einfachen Anwesenheitsüberwachung oder, aufgrund der sehr hohen Auflösung, sogar zur Erfassung von Vitalparametern eingesetzt werden. Das bedeutet, dass die minimalen Bewegungen, die durch die Atmung oder den Herzschlag auf der Oberfläche eines Brustkorbs verursacht werden, stark genug sind, um berührungslos von Radarsystemen erfasst zu werden. Dadurch sind unterschiedliche Anwendungen denkbar:
- Fahrer-Überwachung
- Schlafüberwachung von Babys
- Stressüberwachung der Mitarbeiter
Aufgrund der massiven Integration von Hochfrequenzschaltungen in monolithische Mikrowellen-ICs (MMICs) in den letzten Jahren können Radarsysteme für die oben genannten Zwecke sehr kompakt, kostengünstig und durch die Verwendung eines programmierten Duty-Cycles aller aktiven Komponenten gleichzeitig für sehr geringe Leistung ausgelegt werden. Im Folgenden wird ein hochperformantes Radarsystem mit dennoch geringem Leistungsverbrauch beschrieben, das sowohl in industriellen als auch in medizinischen und Lifestyle-Szenarien eingesetzt werden kann.
Moderne Radarsysteme können je nach verwendeten Signalformen in zwei Hauptkategorien eingeteilt werden. Wird ein unmoduliertes Sinussignal verwendet, handelt es sich allgemein um ein CW-Radar (Continuous Wave). Wird dagegen die Phase, Amplitude und/oder Frequenz der Sinuskurve mit der Zeit geändert, gehört das System zur zweiten Gruppe der modulierten Radarsysteme. Insbesondere in der Automobilindustrie ist das Prinzip des frequenzmodulierten continuous wave (FMCW) Radars weit verbreitet.
Frequenzmoduliertes Dauerstrichradar (FMCW)
Sogenannte FMCW Radarsysteme verwenden lineare Frequenz-Chirps. Aufgrund der verwendeten Bandbreite des Signals kann der absolute Abstand zwischen Ziel und Radar erfasst werden. Die Auflösung hängt dabei hauptsächlich von den Parametern des Frequenzchirps wie Bandbreite und Chirpdauer ab. Eine Phasenauswertung kann weiterhin durchgeführt werden, um kleine Verschiebungen präzise zu überwachen. Die große Signalbandbreite (in der Regel mehrere MHz) erfordert jedoch hohe Abtastraten und einen komplexen Hardware-Aufbau.
Unmoduliertes Dauerstrichradar (CW)
In vielen industriellen Anwendungen sowie bei der Vitalparametererfassung, der Anwesenheitsdetektion und der Schwingungsanalyse ist eine Messung der örtlichen Verschiebung des Ziels notwendig. In diesen Fällen ist der absolute Abstand zwischen System und Ziel nicht von Interesse, während eine hochpräzise Messung der relativen örtlichen Verschiebung um einen Nullpunkt gewünscht ist. Daher wird ein CW-Signal mit der Frequenz \(f\) ausgesendet und vom Messobjekt reflektiert. Am Empfänger wird anschließend die Phasendifferenz zwischen Sende- (Tx) und Empfangssignal (Rx) ausgewertet. Da diese in direktem Zusammenhang mit der Laufzeit \(\tau\) der elektromagnetischen Welle steht, wird die Phase \(\Delta\varphi\) zwischen Tx- und Rx-Signal mit \(\Delta\varphi = 2\pi f \cdot \tau\) berechnet. Die Verschiebung \(\Delta x\) kann dann bestimmt werden, wenn die Lichtgeschwindigkeit \(c\) bekannt ist: $$\Delta x= c \cdot \frac{\tau}{2} = c \cdot \frac{\Delta\varphi}{4 \pi f}$$
Bei Anwendungen im Freiraum entspricht \(c\) der Vakuum-Lichtgeschwindigkeit. Der Faktor zwei in der Gleichung ergibt sich aufgrund der Tatsache, dass eine Zielverschiebung durch \(\Delta x\) sowohl die Laufzeit von Antenne zum Ziel als auch den Weg vom Ziel beeinflusst. In praktischen Anwendungen ist die Wellenlänge (z.B. 12,5 mm bei 24 GHz) deutlich geringer als der absolute Abstand zwischen System und Ziel. Aus diesem Grund tritt zwischen Tx- und Rx-Signal eine unbekannte Anzahl von Sinusperioden auf, die die Bestimmung einer absoluten Reichweite unmöglich macht.
Dank der theoretisch unendlich kleinen Bandbreite des HF-Signals hängt die erforderliche Bandbreite am Empfänger jedoch nur von der Geschwindigkeit \(c\) des bewegten Ziels und somit von der auftretenden Dopplerverschiebung ab. Die minimal erforderliche Bandbreite kann mit $$B_\text{min}=\left(\frac{1+\frac{v}{c}}{1-\frac{v}{c}}-1 \right) \cdot f \approx \frac{2vf}{c}$$ abgeschätzt werden.
Bei der Verwendung eines 24 GHz Signals genügt somit für eine Zielbewegung von 1 m/s eine Bandbreite von nur 160 Hz. Die schmale Signalbandbreite ist ein klarer Vorteil von CW-Radaren, da die Rauschleistung durch entsprechende Filterung reduziert werden kann und somit zu einer hohen Messpräzision führt. Darüber hinaus führen niedrige Abtastfrequenzen zu geringen Datenraten und ermöglichen ein energie- und ressourcenschonendes System. Da keine Modulation erforderlich ist, ist auch der Hardware-Aufwand gering, wodurch kosteneffiziente Lösungen ermöglicht werden.
Es wird deutlich, dass die Entscheidung zwischen CW- und FMCW-Systemtopologie stark von der Anwendung abhängt. Es muss folglich ein Kompromiss eingegangen werden, der zu einem auf die System für ein bestimmtes Szenario führt.
In diesem Artikel wird ein System für die Vibrationsanalyse vorgestellt. Aufgrund der geforderten hohen Messpräzision wurde eine CW-Systemtopologie gewählt. Dadurch ergibt sich ein sehr kompaktes, kostengünstiges und leichtes Radarsystem für dieses Messszenario.
Das verwendete Radarsystem
Der nachfolgende Teil ist in einen Überblick über das System und das verwendete Konzept untergliedert. Im zweiten Teil wird die Realisierung und der Hardwaredemonstrator dargestellt.
Konzept
Das vorgeschlagene System soll die Anwendung von Radarsystemen in verschiedenen Szenarien zeigen. In diesem Abschnitt wird zuerst der Aufbau der Firmware, des Hochfrequenzbereichs und des Basisbandes beschrieben.
Für viele Anwendungen ist eine hohe Abtastrate nicht unbedingt notwendig, dafür aber eine niedrige Leistungsaufnahme erforderlich. Daher ist die Firmware so ausgelegt, dass dies je nach Anwendung eingestellt werden kann. Da sämtliche aktiven Komponenten wie Phase-Locked-Loop (PLL), Transceiver, temperaturkompensierter Crystal-Oszillator (TCXO) und Analogverstärker so in das System integriert sind, dass diese abgeschaltet werden können, kann ein hoher Anteil an Leistung eingespart werden. Dieses Prinzip, dass der Mikrocontroller alle aktiven Komponenten in der richtigen Reihenfolge zur Durchführung der Messung einschaltet und unmittelbar danach wieder abschaltet wird als Duty-Cycling bezeichnet. Kurz nach der Messung und dem Abschalten aller Komponenten geht der Mikrocontroller in den Schlafmodus und wacht durch einen intern erzeugten Timer-Interrupt wieder auf. In der Folge wird der Stromverbrauch enorm reduziert wobei die Auflösung erhalten bleibt. Um Unterabtastung zu vermeiden muss jedoch das Nyquist Theorem mit \(f_\text{sampling}>2f_\text{max}\) beachtet werden. Daraus ergibt sich, dass die Frequenz des Duty-cyclings nicht unter das Zweifache der erwarteten Vibrationsfrequenz des Ziels fallen darf.
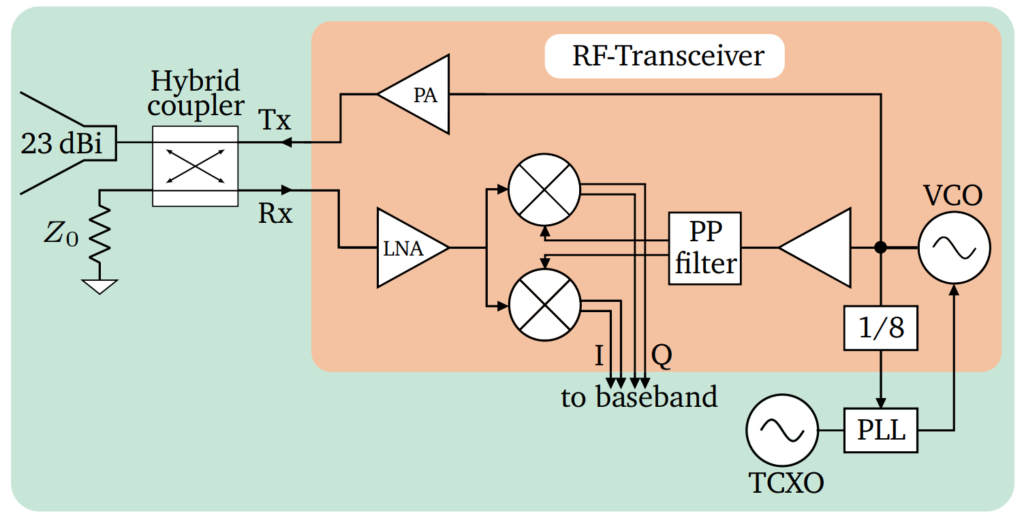
Als erster Ausschnitt der Hardware wird der Hochfrequenzteil als entscheidender Bereich des Radarsystems im Detail erläutert. Das Blockdiagramm ist dazu in Abbildung 1 dargestellt. Eine Hauptkomponente ist der verwendete 24 GHz-Ultrabreitband-Transceiver. In diesem System ist die Bandbreite ein Freiheitsparameter, um die ideale Anpassung des verwendeten Hochfrequenzübergangs von Mikrostreifenleitung zum Hohlleiterflansch durchzuführen, der für die verwendete 3D-gedruckte Hornantenne notwendig ist. Die Ausgangsfrequenz wird intern durch einen spannungsgesteuerten Oszillator (VCO) erzeugt und durch die externe PLL ADF4158 fixiert. Die PLL erhält das rückgekoppelte und durch 8 geteilte Ausgangssignal des VCOs und vergleicht dieses mit einer bekannten Referenz, die von einem TCXO als temperaturstabilen Frequenzquelle abgeleitet wird.
Die Ausgangsleistung des Signals kann durch den integrierten Leistungsverstärker (PA) mit zusätzlichen 4 dBm erhöht werden. Dies vergrößert folglich auch den Signal-Rauschabstand (SNR) und führt somit zu einer höheren Präzision der Messung. Allerdings erhöht sich dadurch natürlich auch die Leistungsaufnahme. Da in diesem System ein monostatischer Ansatz verfolgt wird, passiert das HF-Signal anschließend einen externen Hybridkoppler. Das bedeutet, dass für den Sende- und Empfangspfad dieselbe Antenne verwendet wird, wodurch zwar die Kosten und die Größe des Systems sinken, andererseits aber die Performanz des Systems von der Qualität des Radarkopplers abhängen, der in einem realen System nicht als ideal angesehen werden kann. Als Antenne wird eine 3D lasergesinterte Hornantenne verwendet. Durch eingebrachte Löcher konnte das Gewicht um mehr als 30% reduziert werden. Da die enthaltenen Löcher einen ausreichend geringen Durchmesser besitzen, wird die Ausbreitung der elektromagnetischen Welle nicht beeinflusst. Das vom Ziel rückgestreute Signal wird dann über den Empfangspfad in den Transceiver geleitet. Vor der Durchführung der Abwärtskonvertierung kann das SNR durch Einschalten des integrierten rauscharmen Verstärkers (LNA) zusätzlich weiter erhöht werden. Schließlich werden vier abwärts gewandelte Gleichspannungen erzeugt und das differentielle IQ-Signal gebildet. Durch die Verwendung von differentiellen Signalen wird das System außerdem toleranter gegenüber Gleichtaktstörungen im Basisband.
Im nächsten Teil wird die analoge Basisbandschaltung genauer untersucht. Die Schaltung ist in Abbildung 2 dargestellt und ist zwei Teile, außerhalb und innerhalb des verwendeten Mikrocontrollers STM32F373, aufgeteilt.

Die Abbildung zeigt die Schaltung für den I- oder Q-Kanal und beginnt mit einem volldifferentiellen Verstärker, der die Signale verstärkt und dabei die differentielle Charakteristik beibehält. Dies hilft, Gleichtaktstörungen zu vermeiden und optimiert somit das SNR. Anschließend wird ein passives Tiefpassfilter zur Unterdrückung hochfrequenter Signalanteile eingesetzt. Das Filter muss jedoch so ausgelegt sein, dass die kurzen DC-Pulse, die durch das Duty-Cycling und die kurzen HF-Impulse verursacht werden, dieses Filter noch passieren können und nicht unterdrückt werden. Dieser Kompromiss zwischen Bandbreite und Einschwingzeit ist ein Schlüsselfaktor für diese Art von Radarsystemen. Im Inneren des Mikrocontrollers werden die Differenzsignale durch einen PGA (Programmable Gain Amplifier) weiter verstärkt, bevor sie mit dem integrierten 16-Bit-Sigma-Delta-ADC digitalisiert werden. Die I- und Q-Daten werden schließlich über eine FTDI-Schnittstelle und einen universellen seriellen Bus (USB) an den Host-PC übertragen, wo die Daten in Matlab weiterverarbeitet werden.
Anschließend wird durch $$\Delta\varphi=\arctan\left(\frac{Q}{I}\right)$$ die Phasendifferenz direkt berechnet woraus sich ohne großen Aufwand die relativen Verschiebungen des Ziels durch \(\Delta x= c \cdot \frac{\tau}{2} = c \cdot \frac{\Delta\varphi}{4 \pi f}\) ergibt. Nach dieser grundlegenden Berechnung wird eine schnelle Fourier-Transformation (FFT) angewendet, um beispielsweise die Vibrationsfrequenz des Ziels oder die Herz- und Atemfrequenz einer Person zu berechnen.
Hardware-Demonstrator des Radarsystems
Dieser Abschnitt beschreibt den Hardware-Demonstrator, der in Abbildung 3 dargestellt ist. Die Schaltung wird auf einem vierlagigem Stack-Up mit Kernen aus dem HF-Material Rogers RO4350B-Material aufgebaut. Insbesondere für ein hohes Produktionsvolumen ist dieser Stack-Up sehr kostengünstig bei immer noch ausgezeichneter Leistung. Um den neuartigen Übergang zwischen Mikrostreifenleitung und Hohlleiter WR42 zu realisieren, sind außerdem Blindvias nötig. Der verwendete Übergang wird in [2] vorgestellt und lässt zu, dass die Antenne auf der Rückseite der Leiterplatte (PCB) montiert werden kann. Dadurch koppeln rückgestreute Signale kaum in die resonanten Strukturen des Hybridkopplers auf der Vorderseite ein, was die Leistungsfähigkeit insbesondere bei sehr kleinen Verschiebungsamplituden weiter verbessert. Die Antenne selbst ist als Hornantenne mit einem Gewinn von 23 dBi realisiert und stimmt mit den Simulationen aus CST Microwave Studio sehr gut überein. Für Anwendungen, die eine kleinere Antenne erfordern, kann ein Patch-Array wie in [3] dargestellt, oder eine kleinere Hornantenne verwendet werden. Das Entscheidende ist dabei stets einen Kompromiss zwischen der erforderlichen Leistung und der Größe und dem Gewicht zu finden.

Beim Blick auf die Leiterplatte des Demonstrators wird die Trennung von digitalem, analogem und HF-Teil der Schaltung deutlich. Dies ist wichtig, um die elektromagnetischen Interferenz (EMI) zwischen digitalen und analogen Teilen zu reduzieren, wodurch die Signalqualität stark beeinträchtigt werden kann. Das Gesamtgewicht ohne Kabel beträgt 67g, wobei die Leistungsaufnahme bei einem Tastverhältnis von 19 Samples pro Sekunde (Sa/s) zu weniger als 10 mW bestimmt werden kann. Durch eine derartige Reduzierung der Leistung ist es sogar möglich mit einem ähnlichen System unter einer Leistung von 30 µW zu liegen [4].
Messungen
Mit dem in Abbildung 3 dargestellten Demonstrator wurden zwei Messungen durchgeführt, um die Fähigkeiten in industriellen und medizinischen Sensorikanwendungen der Hochfrequenztechnik zu zeigen. Beide Messungen wurden bei identischem Abstand zum Ziels (0,8m) und mit einer Abtastfrequenz von (19 Sa/s) vorgenommen.
Das erste Szenario repräsentiert eine typische Industrieanwendung, bei der eine Metallplatte mit einer Größe von 12×8 cm² mittels linearem Schrittmotor relativ zum Radarsystem bewegt wird. Der Motor wird so angesteuert, dass sich das Radarziel sinusförmig mit einer Gesamtamplitude von nur 5 µm und einer Frequenz von 0,7 Hz vor und zurück bewegt. In Abbildung 4 sind die Messdaten nach digitaler Filterung dargestellt. Es ist deutlich zu sehen, dass die gemessene Amplitude mit der spezifizierten Amplitude des Schrittmotors sehr gut übereinstimmt. Die Frequenz der Oszillation kann mittels FFT einfach und sicher ermittelt werden.
In einer zweiten Messung aus dem Bereich der Radarsensorik in der Medizin sitzt eine Person im Abstand von 0,8 m vor der Antenne. Die Hauptkeule der Antenne ist auf den Brustkorb der Person ausgerichtet. Nach entsprechender Filterung der Rohdaten sind die periodischen Herzschläge sehr deutlich zu erkennen, was in Abbildung 5 dargestellt ist. Die Anwendung der FFT führt schließtlich zu einer ermittelten Herzfrequenz von 62 Schlägen pro Minute.


Zusammenfassung
In diesem Artikel wurden zwei Hauptanwendungen von Radarsensorik in Industrie und im Gesundheits- oder Lifestyle-Sektor präsentiert.
In Industrieanwendungen kann Radartechnik dazu verwendet werden, kleinste Bewegungen zu detektieren. Dies könnten beispielsweise Änderungen in Vibration oder Schwingungsfrequenzen von beweglichen Teilen und Maschinen sein, die wichtige Informationen zur Prävention von Materialermüdungen und Fehlern liefern.
Im medizinischen Bereich und Gesundheitssektor können Änderungen der Atem- und Herzrate berührungslos erfasst werden, um beispielsweise die Ermüdung oder psychischen Stress bei Kraftfahrzeugführern frühzeitig zu erkennen. Außerdem können Risikogruppen wie Babys oder Vorerkrankte einfach und kontinuierlich überwacht werden, ohne die Person merklich einzuschränken.
In beiden Anwendungsgebieten ist es von großem Vorteil, dass elektromagnetischen Wellen nicht leitende Materialien wie Kleidung, Schmutz, Nebel oder sogar Matratzen ungestört durchdringen können. Aus diesem Grund sind unzählige weitere Anwendungen für derartige Systeme denkbar. Da außerdem die Kosten für Radarkomponenten kontinuierlich sinken, während die Leistungsfähigkeit der Mikrocontroller stetig wächst, stellen kompakte Radarsysteme eine der Schlüsseltechnologien der Zukunft in unterschiedlichsten Sensorikszenarien dar.
Interesse geweckt?
Sie sind interessiert an einer maßgeschneiderten Lösungen zur berührungslosen Messung von Vibrationen oder Vitalparametern? Kontaktieren Sie uns und folgen Sie uns auf LinkedIn!
Weiterführende Literatur
[1]
B. Scheiner, F. Michler, F. Lurz, R. Weigel, and A. Koelpin, “Nothing Beats SNR: Single-Digit Micrometer Ranging Using a Low-Power CW Radar Featuring a Low-Weight 3D-Printed Horn Antenna”, IEEE Microwave Magazine, vol. 21, iss. 1, pp. 88-95, 2020.
[2]
E. Hassan, B. Scheiner, F. Michler, M. Berggren, E. Wadbro, F. X. Röhrl, S. Zorn, R. Weigel, and F. Lurz, “Multi-Layer Topology Optimization of Wideband SIW-to-Waveguide Transitions”, IEEE Transactions on Microwave Theory and Techniques, 2020.
[3]
F. Michler, B. Scheiner, F. Lurz, R. Weigel, and A. Koelpin, “(Micro)metering with Microwaves: A Low-Cost Low-Power High-Precision Radar System”, IEEE Microwave Magazine, vol. 20, iss. 1, pp. 91-97, 2019.
[4]
F. Lurz, F. Michler, B. Scheiner, R. Weigel, and A. Koelpin, “Microw(h)att?! Ultralow-Power Six-Port Radar”, IEEE Microwave Magazine, vol. 19, iss. 1, pp. 91-98, 2018.